Độ chính xác là điều mà các kỹ sư trắc địa đều hướng tới, cho dù sử dụng bất kỳ công nghệ, thiết bị, dụng cụ đo đạc nào. Người ta đã quá quen với việc sử dụng máy đo RTK để định vị tọa độ, máy toàn đạc trong khảo sát – thi công hay máy thủy bình trong việc đo, khống chế cao độ.
Tuy nhiên, cả 3 phương pháp truyền thống trên đều đòi hỏi người đo đạc phải bỏ ra công sức làm việc trong điều kiện khắc nghiệt trên mặt đất. Đó là lý do UAV (Drone) khảo sát được dùng trong rất nhiều nhiệm vụ trắc đạc – thành lập bản đồ.
Với một chiếc drone khảo sát, có 3 cách để đạt độ chính xác theo yêu cầu của dự án:
- Bay chụp sử dụng điểm khống chế mặt đất GCPs
- Bay chụp đo động thời gian thực RTK
- Bay chụp đo động xử lý hậu kỳ PPK
Cả 3 phương pháp này đều có ưu – nhược điểm riêng, hãy cùng phân tích những lợi ích cũng như bất cập của cả 3 pháp này!
Mục Lục
1. Bay chụp bằng máy bay với điểm khống chế mặt đất GCPs
Điểm khống chế mặt đất GCPs là một loạt các điểm được đặt dưới mặt đất theo một mật đô được tính toán trước, được đánh dấu tọa độ, có thể nhìn thấy bằng camera của máy bay. Các điểm khống chế này cung cấp cho phần mềm những dữ liệu qua trọng trong việc thành lập bản đồ, mang lại độ chính xác lên tới 20 – 50mm.
Tham khảo: Điểm khống chế mặt đất GCPs là gì?
1.1 Ưu điểm
- Việc sử dụng điểm khống chế đã quen thuộc với nhiều kỹ sư.
- Nếu thiết lập điểm khống chế tốt, người dùng chỉ cần đến những máy bay có cấu hình bình thường và giá thánh thấp như DJI Phantom 4 Pro V2.0
- Cung cấp thông tin cơ bản về độ chính xác của dự án
1.2 Nhược điểm
- Thời gian thiết lập trước khi bay rất lâu, có thể lên tới 1,2 ngày trước khi tiến hành ca bay.
- Đòi hỏi nhiều nhân sự và nhiều thiết bị cồng kềnh
- Không thể thiết lập điểm khống chế tại các khu vực khó khăn, nguy hiểm
- Độ chính xác của các dự án hoàn toàn phụ thuộc vào chất lượng và cách thiết lập GCPs

Tóm lại, mặc dù sử dụng điểm khống chế khi khảo sát bằng máy bay không người lái đã được chứng minh về độ chính xác trong nhiều năm, nhưng hiện đã có những phương pháp an toàn hơn, nhanh hơn và mạnh mẽ hơn.
2. Bay chụp bản đồ bằng phương pháp đo động thời gian thực
RTK là một kỹ thuật được sử dụng để nâng cao độ chính xác định vị của hình ảnh được máy bay không người lái thu thập trong thời gian thực. Quy trình làm việc RTK bao gồm hệ thống định vị dựa trên vệ tinh GNSS, trạm Base, chẳng hạn như Trạm base D-RTK 2 hoặc các trạm base thiết lập bằng máy GPS RTK hãng eSurvey.
Quy trình làm việc RTK cho phép sửa các hình ảnh được gắn thẻ địa lý của máy bay không người lái khi đang bay, do đó, loại bỏ nhu cầu chỉnh sửa sau chuyến bay và giảm sự phụ thuộc vào GCP.
Tham khảo: Đo RTK và nguyên lý của nó!
2.1 Ưu điểm
- Kết quả các phép đo có sẵn ngay sau ca bay, chỉ việc xuất bản đồ là hoàn thành
- Cung cấp thời gian thực, vị trí chính xác cao của máy bay không người lái
- Loại bỏ việc thiết lập điểm khống chế GCP nếu tất cả các kết nối đều không đổi trong suốt ca ba
2.2 Nhược điểm
- Thành công của ca bay phụ thuộc vào sự ổn định của nhiều kết nối, nên dễ bị thất bại (Do chỉ cần 1 kết nối bị ngắt quãng, là phải khởi tạo từ đầu)
- Một khi khởi tạo sẽ mất nhiều thời gian và dữ liệu
- Nhiệm vụ ngoài phạm vi đo từ xa, ví dụ: mở rộng tầm nhìn trực quan (EVLOS) hoặc xa hơn tầm nhìn trực quan (BVLOS), là không thể
- Không có sẵn dữ liệu hiệu chỉnh sau chuyến bay, tức là khu vực bay bị giới hạn bởi cường độ tín hiệu
- Bất kỳ lỗi nào ở vị trí trạm tĩnh đều phải được sửa sau chuyến bay, điều này làm giảm lợi thế thời gian thực

Phương pháp này hoạt động tốt ở địa hình bằng phẳng, nơi tín hiệu kết nối không bị gián đoạn bởi những thứ như cây cối hoặc tòa nhà hoặc trong trường hợp kết nối 4G đáng tin cậy.
Tuy nhiên, quy trình làm việc RTK không bao giờ được coi là sự thay thế hoàn toàn của GCPs, ngay cả khi những quy trình này chỉ được sử dụng làm Điểm kiểm tra để xác thực độ chính xác của dự án..
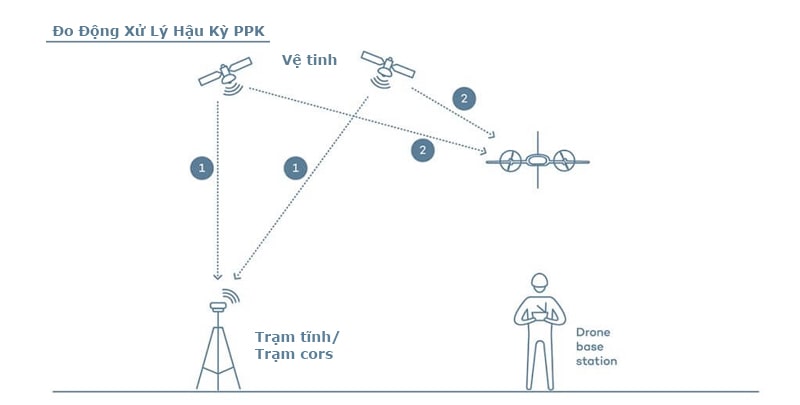
3. Bay chụp sử dụng phương pháp đo động xử lý hậu kỳ PPK
Một phương pháp thay thế cho RTK là PPK. Kỹ thuật này sử dụng các thành phần giống hệt với các thành phần được sử dụng trong quy trình RTK, nhưng có một điểm khác biệt quan trọng – thẻ tọa độ của hình ảnh được gắn SAU CA BAY.
Ngược lại với RTK, quy trình làm việc PPK KHÔNG liên quan đến kết nối thời gian thực giữa máy bay không người lái và trạm tham chiếu. Do đó, PPK có một lớp dự phòng thu thập dữ liệu quan trọng.
Tham khảo: Máy Bay Khảo Sát RTK Và PPK – Cái Nào Tốt Hơn?
3.1 Ưu điểm
- Trạm base GNSS không cần kết nối với trạm điều khiển mặt đất của máy bay không người lái
- Bất kỳ trạm CORS nào cũng có thể được sử dụng – thay cho trạm tĩnh
- Cách thiết lập đơn giản hơn – không cần quá nhiều liên kết đo từ xa hoạt động liên tục
- Nhiệm vụ ngoài phạm vi đo từ xa, ví dụ: có thể mở rộng tầm nhìn trực quan (EVLOS) hoặc xa hơn tầm nhìn trực quan (BVLOS)
- Một số nguồn cho biết PPK chính xác hơn vì có thể sử dụng dữ liệu để chuyển tiếp và lùi quá trình xung quanh bất kỳ khoảng trống nào để sửa.
- Không cần thiết lập điểm khống chế GCP
3.2 Nhược điểm
- Mất thời gian hiệu chỉnh tại phòng nội nghiệp sau ca bay.
Rõ ràng là PPK có một số ưu và nhược điểm tương tự như RTK khi so sánh nó với phương pháp GCP truyền thống. Sự khác biệt chính giữa PPK và RTK là PPK cung cấp quy trình làm việc mạnh mẽ hơn nhiều, với tính năng an toàn dự phòng vốn có của nó là không có kết nối trực tiếp giữa máy bay không người lái và trạm tham chiếu.
4. Kết luận
Mỗi phương pháp đều có ưu và nhược điểm, nhưng trong mọi trường hợp, việc tích hợp công nghệ GNSS đã cải thiện đáng kể quy trình làm việc của các kỹ sư khi sử dụng máy bay không người lái trong công tác đo đạc – thành lập bản đồ, mang lại độ chính xác, hiệu quả, tiết kiệm chi phí và quan trọng nhất là an toàn.